Last semester I tried out some technical project teams at UW-Madison, but none of them really caught my interest. Over the past 15 weeks, though, I’ve worked with the new WiscoHumanoids club to design a prototype/initial version of a humanoid robot’s lower leg using what I learned in FIRST Robotics and my college coursework so far. My contributions to the project include research into range-of-motion and required strengths, calculations of worst-case torque requirements, and structural design of an ankle and calf.
Research and Planning
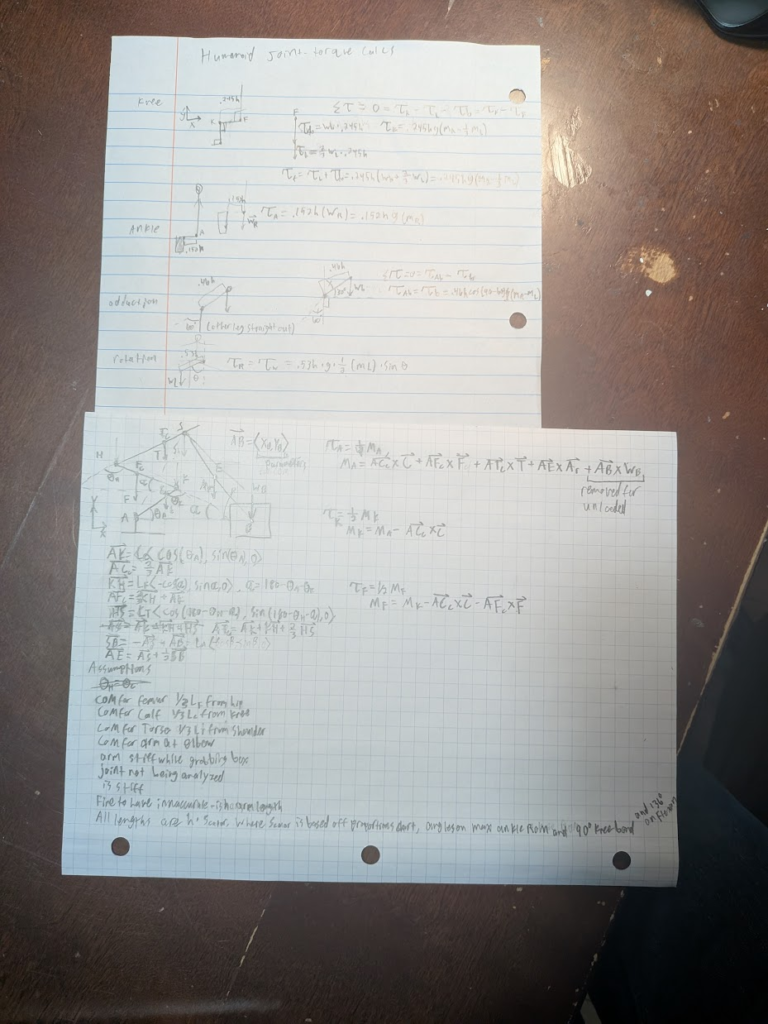
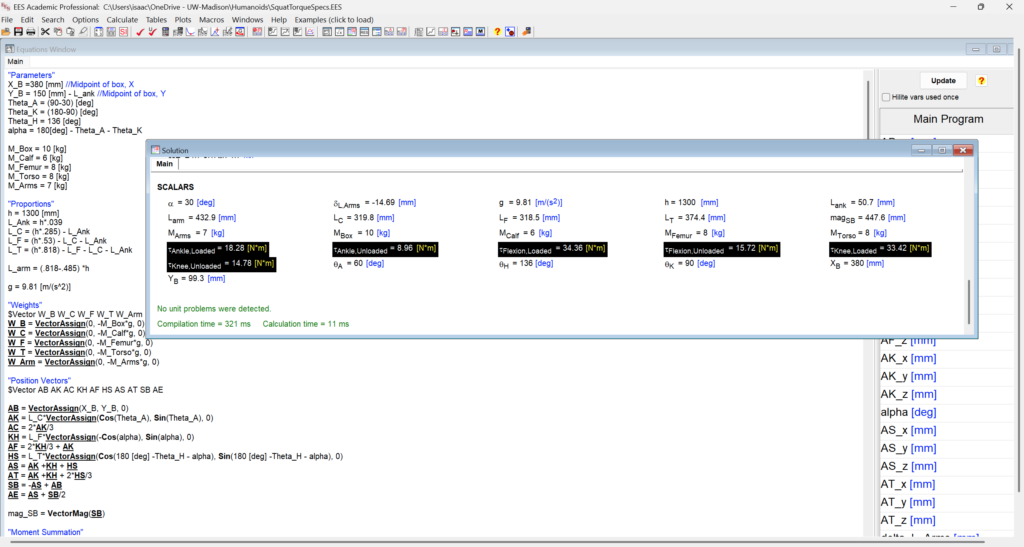
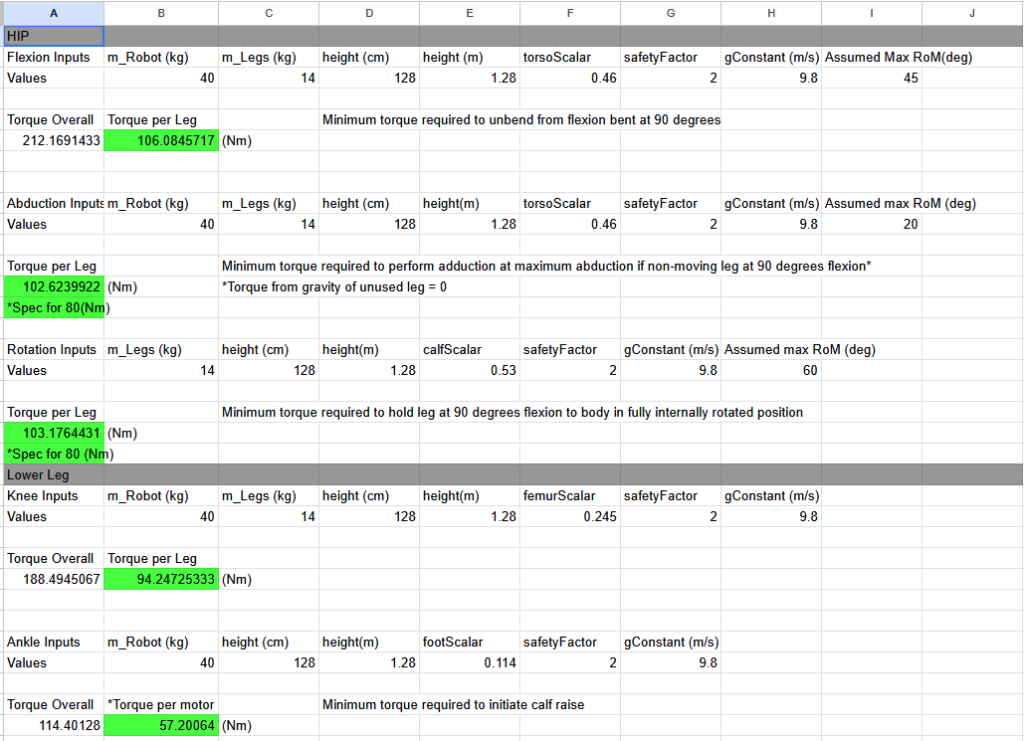
We didn’t do any design for the first 3-4 weeks of the semester, instead taking our time to define the requirements of our robot, look into the current state of the industry, and set ourselves up for our design phase. Glossing over the boring stuff, this meant a good amount of presentations at weekly meetings for the Legs Mechanical subteam that led us to the selection of our actuation strategy for each joint. Another result of these meetings was motor selection, for which I performed worst-case loading scenario calculations applying the techniques and software taught in my Statics class to compile a spreadsheet of torque requirements for each joint.
Design
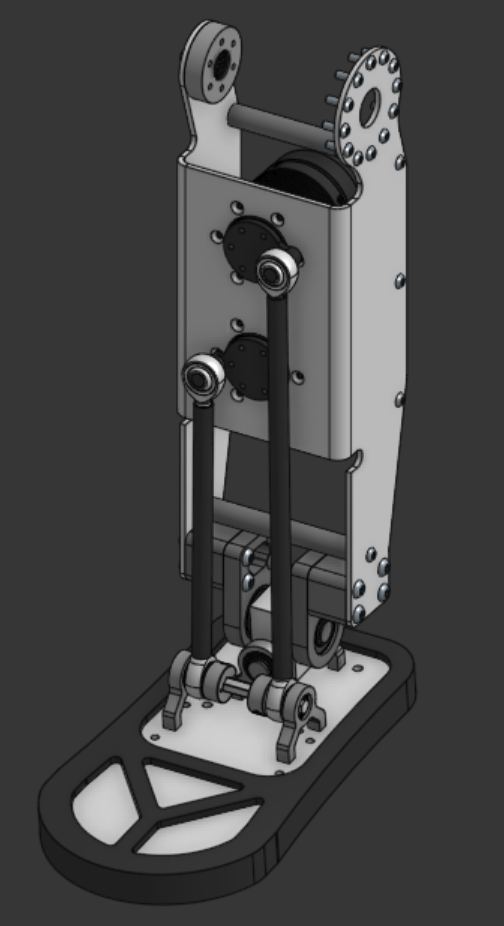
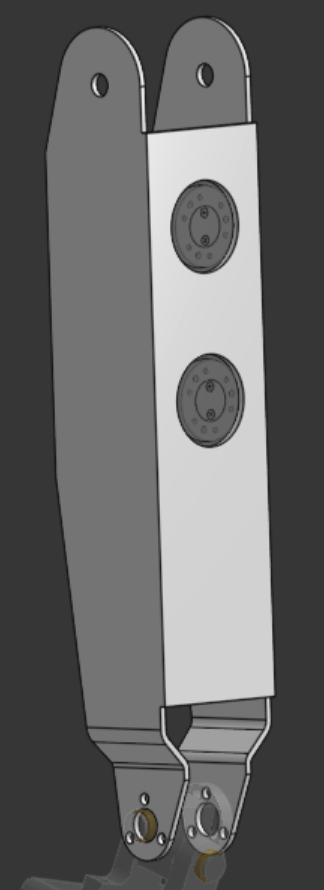
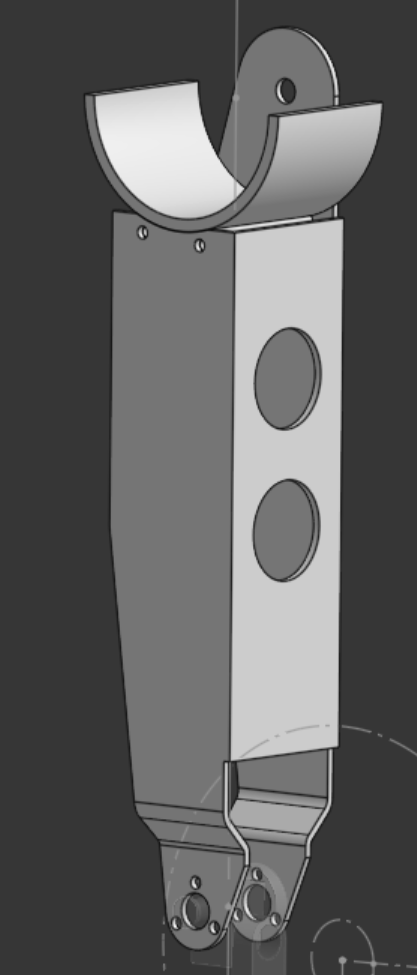
Before heading into CAD, I made some quick sketches of my initial thoughts on what the ankle and shin should look like. The ankle joint requires rotation on two axis, which led me to a U-joint. For simplicity of control, I figured the axes should intersect and drew out an idea with a shaft slotting into a machined block-shaft, with bushings to reduce friction at a low cost. As for the calf, I figured sheet metal plates would work well weight-wise due to the large gap between the knee and ankle, as well as the need to mount ankle-motors to drive linkages at undetermined locations. Shortly after drawing this, we decided to have the linkages mount at the front of the shin; this made it necessary to have features on three faces of the shin and made it really compelling to make the calf out of sheet metal, allowing for one plate to serve all of our needs without any awkward brackets. Plus I wanted to work with bent sheet metal.
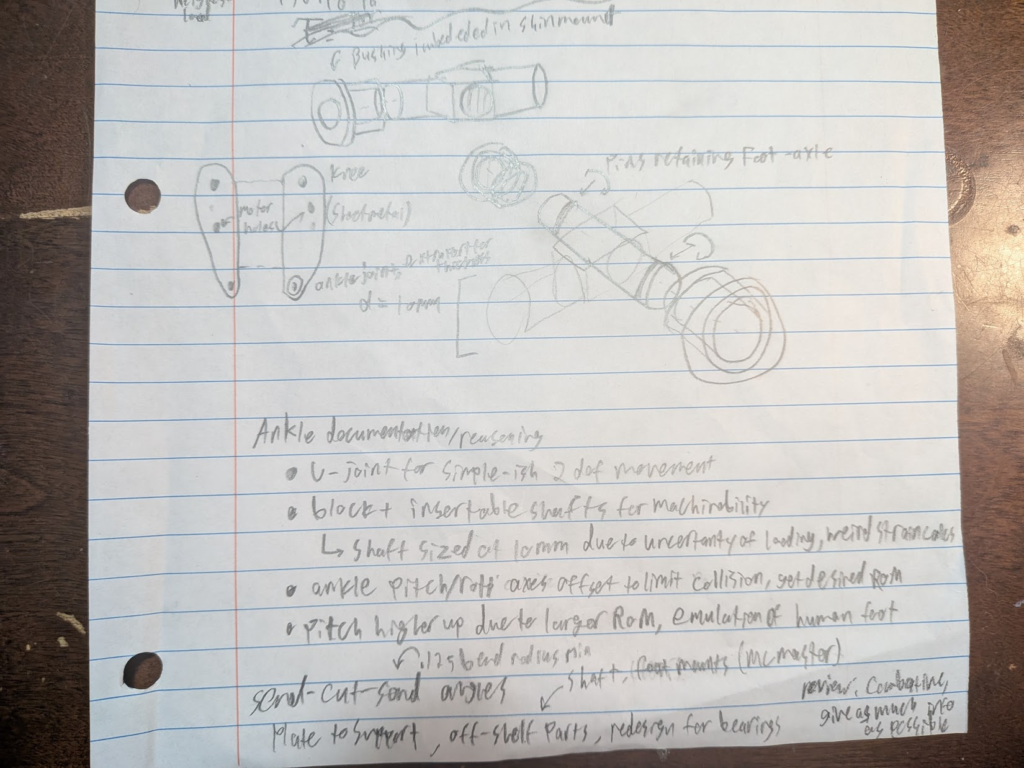
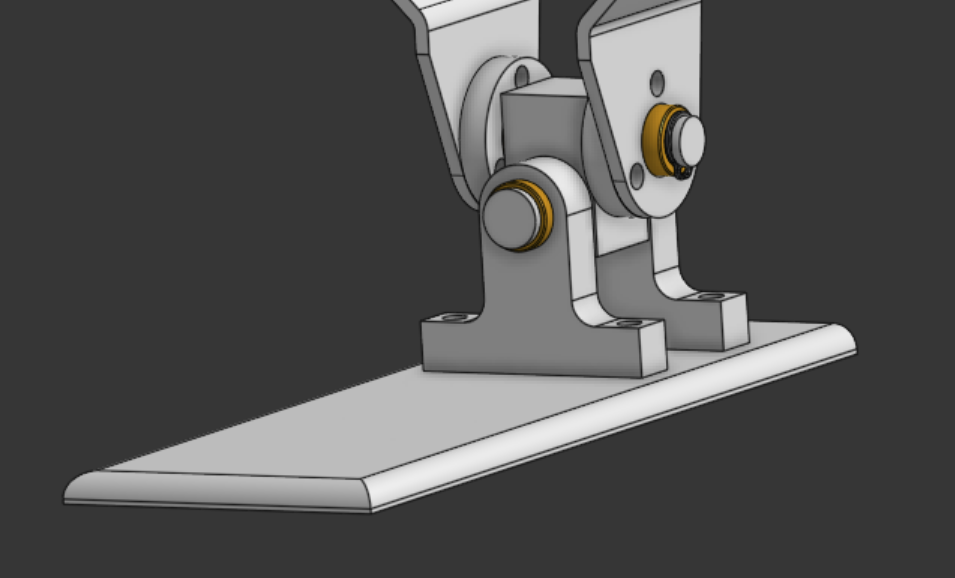
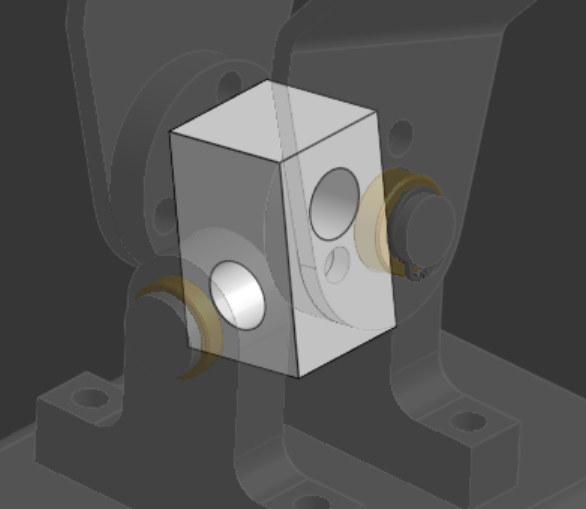
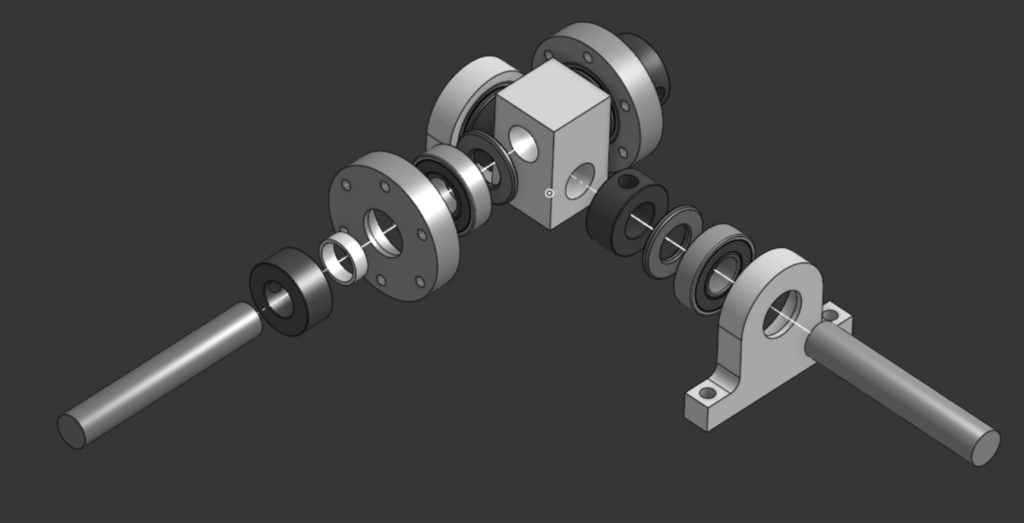
I made a proof-of-concept to show at a legs meeting, and in the making of it realized why my U-joint drawing looked different than those on Menlo’s Asimov or Unitree’s G1. Intersecting axes bring the mounts for the calf and foot really close together, necessitating a low range of motion or really long shafts to prevent parts from colliding. The idea of really long shafts rubs me the wrong way since they need to hold up to the load of an entire ~40 kg robot, so I offset the shafts from each other to simplify the problem. To make future manufacturing of these parts easier, I split the joint into a dedicated block and two shafts that slide into it that can be machined in far easier operations.
As for the calf plate, it wasn’t too impressive. I had a couple ideas depending on the direction the knee went, one of which was just mounting on both sides of the thigh. The other was to cantilever the calf, attach a sleeve on the direct-drive knee motor, and let the motor sleeve press against a low friction part on the calf. This would allow for a narrow shin, where the both-side-mounting option must be wide than the thigh.
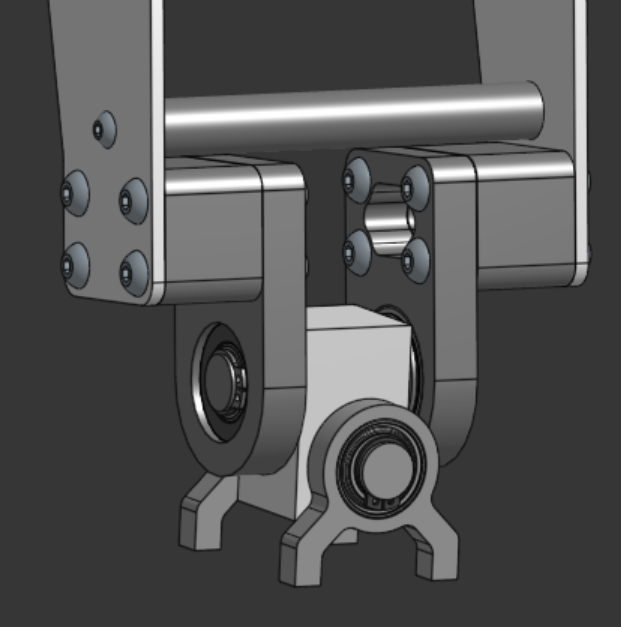
After the proof of concept meeting and an initial design review, I made some changes. I redesigned the ankle to use bearings after another member voiced concerns using bushings, plus added hardware to make it a bit more realistic. I opted for locking collars instead of retaining rings to reduce manufacturing requirements for the ankle’s pitch and roll axes, and was still careful to avoid parts interfering within the allowed range of motion.
As for the calf plate, I just did some polishing to make it more realistic. Some feedback I got on it was that the bends might be week and need support, so I added plates to brace it.
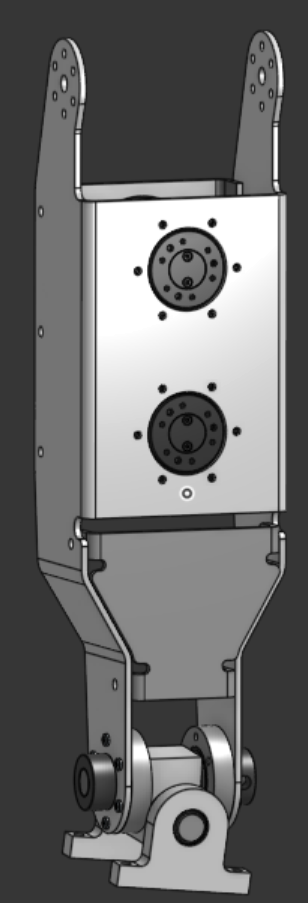
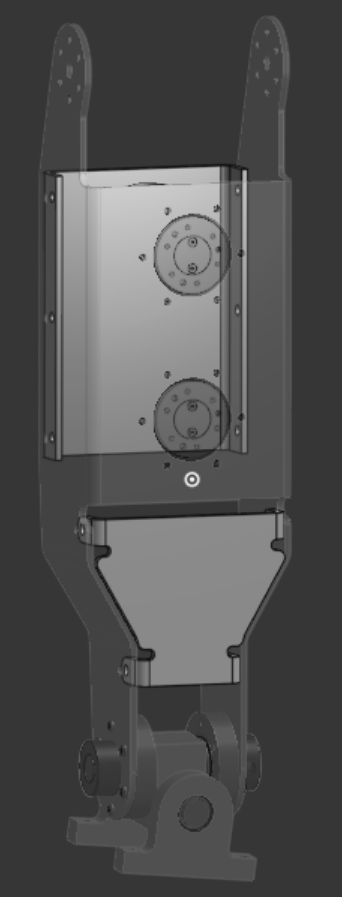
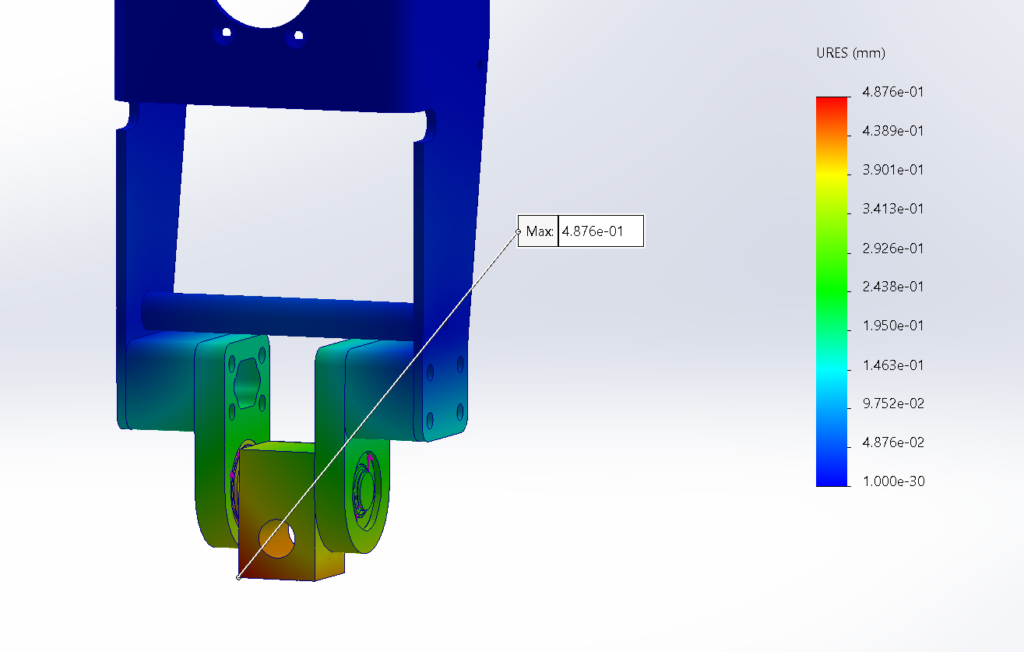
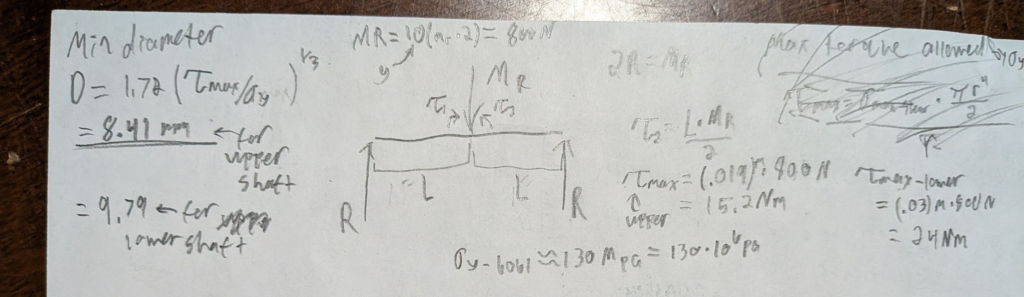
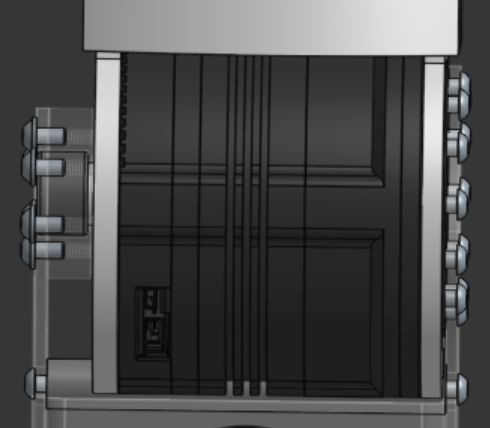
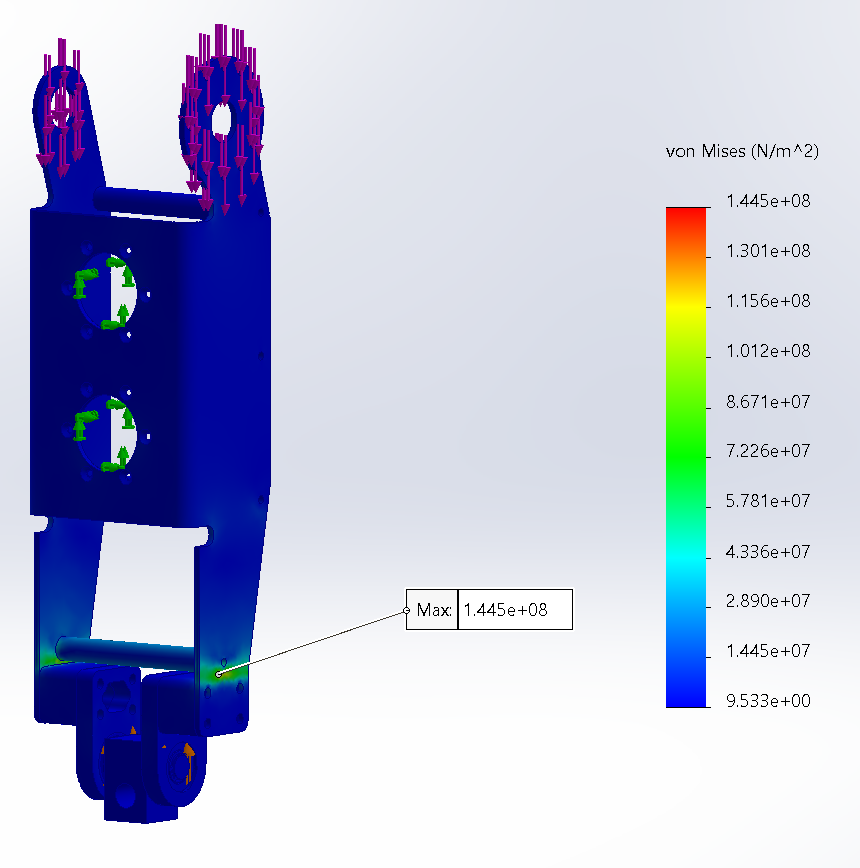
After a while other members of my team weren’t happy with the bends forming a taper on the bottom of the calf plate to meet the ankle, so I redesigned the ankle to remove it and make it simpler in general – this included going back to retaining rings. I also did a good amount of Solidworks simulations to verify the design wouldn’t deform or be stressed too much, but what little I was taught of simulations in my intro to MechE class last semester didn’t leave me too confident in my analysis. I also did a couple hand calculations prior to making this more finalized version of the ankle to verify that I had an appropriate shaft diameter selected for the shafts.
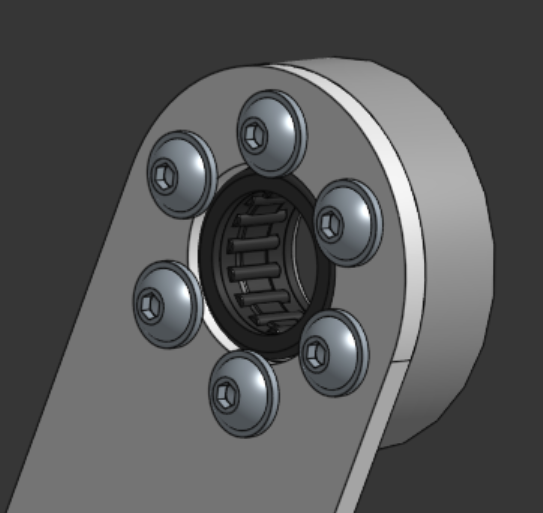
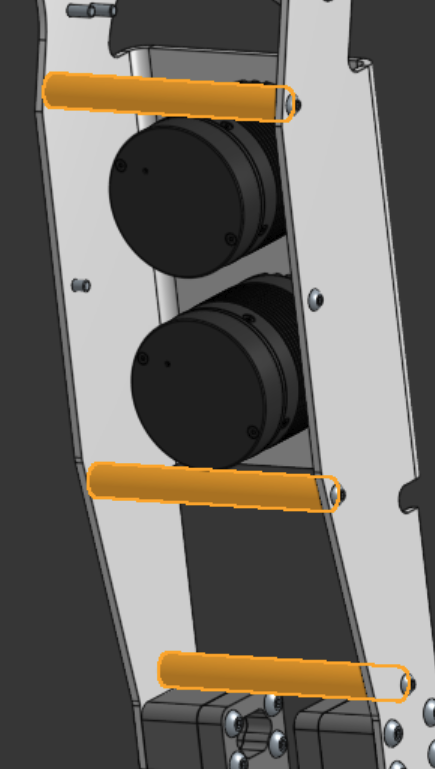
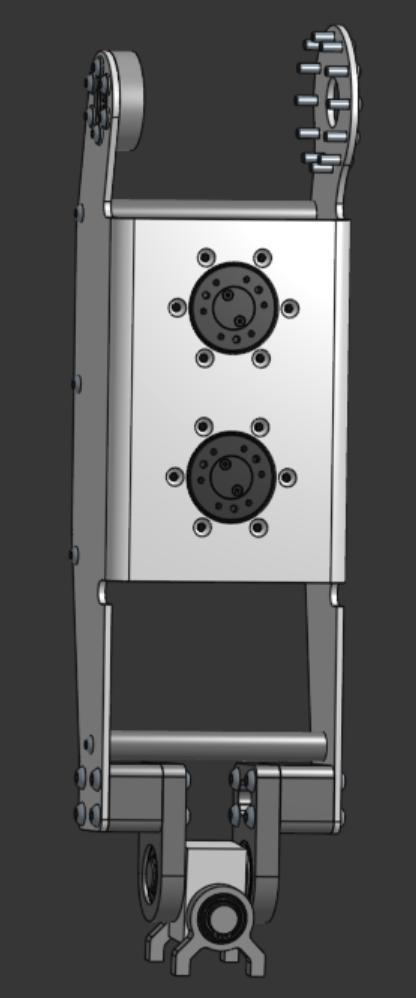
Back to the calf, this latest version can actually mount to the knee using a roller bearing interfacing with a shaft on the inner thigh to ensure the calf isn’t cantilevered nor dealing with high friction. I also replaced the structural plates from the last iteration with simpler and more effective threaded shafts .
The design isn’t finalized, but next semester we’ll finish it up and start manufacturing these parts. On top of that, we’ll start designing casing to protect the robot and make it more visually appealing.
What I’ve learned
I used a lot of the skills that I’ve been using the past four years, like modeling parts in CAD and using intuition to create designs. With this project, though, I’ve been working with older engineering students who’ve pushed me to be more data-driven and perform hand calculations to make decisions. I’ve also practiced what I’ve learned in classes, notably static equilibrium and Solidworks simulations, in applications beyond those expected at this point in my curriculum.
On top of what I’ve learned working with members of the club, I’ve had the opportunity to talk to grad students and notable figures in the robotics industry. Early on in the semester I tagged along with the leadership team to visit UW grad students in their robotics lab, where we watched Unitree robots move firsthand, saw details of how they work we couldn’t online, and spoke to students dedicating their time to a field the club is just entering. Later on, our last design review was a call with Scott Walter, Co-Founder Emeritus at Visual Components and a very active person in analyzing developments in the humanoid robotics industry. It was valuable to hear his criticisms and feedback of the calf and leg in general, and his emphasis on having reasoning you can defend behind every decision has stuck with me.
Leave a Reply